����������
1����PSO�㷨�M�и��M
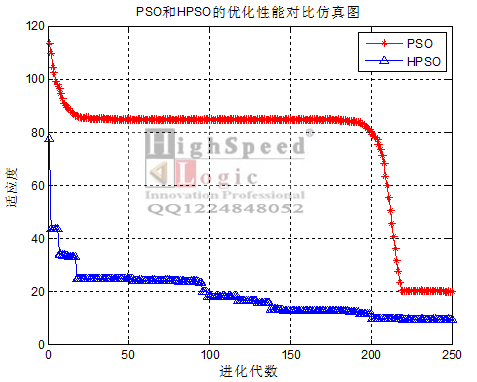
��PSO�㷨�M������ķ������о����PSO�㷨��ʹ���^���д�����������ֲ��(y��u)���Ք����Ȳ��ߵ�ȱ�����������f�A����Ⱥ��(y��u)���㷨(HPSO)�������㷨���Ք����M���C��������HPSO�Ļ���˼���ǣ�������(y��u)���ą���(sh��)�֞���ƌӺͅ���(sh��)�Ӄɲ������������ƌ�̎���ό��������ö��M�Ʒ�ʽ���a����l(f��)����ʾ����������̎�ڼ����B(t��i)�����0����ʾ����������̎�����ߠ�B(t��i)�����c֮��(li��n)ϵ�ą���(sh��)��̎�ڟoЧ��B(t��i)������(sh��)��̎������������ܿ��ƌӵĿ������������(sh��)�����Ӳ��Ì���(sh��)���a��ʽ������
ͨ�^��������C����HPSO�㷨��PSO�㷨Ӌ�㾫�ȸ�����Ք��ٶȿ�����
�����㷨�OӋ���ְ����� = 1 \* GB3 ���������S�C�ķ������������}���g�����Ӳ��ҿ��Ԍ��Լ���̎�ĭh(hu��n)���M���u�r(Ӌ���m����)�� = 2 \* GB3 ��ÿ�����Ӿ�����ӛ���Լ����^�����λ������ = 3 \* GB3 ��ÿ�����ӿ��Ը�֪�����������_�������λ��������� = 4 \* GB3 ���ڸ�׃�ٶȵĕr��ͬ�r���]�Լ����^�����λ�ú������������_�������λ���������
2��������������OӋ
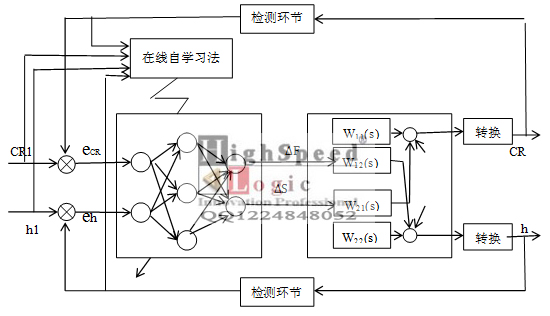
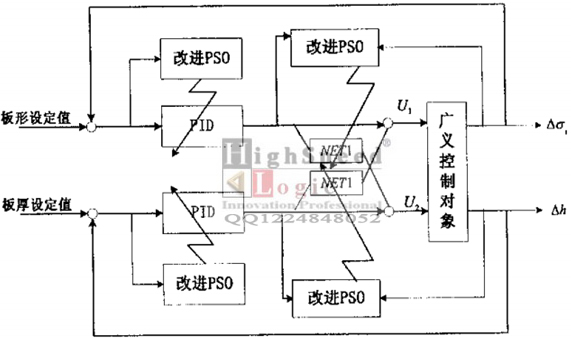
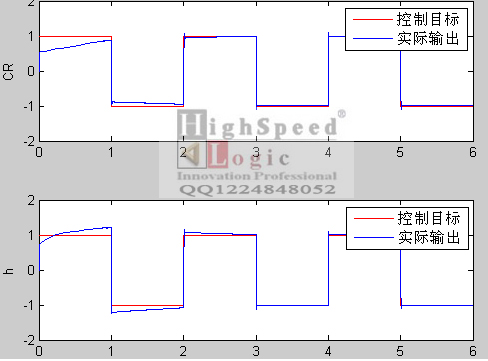
���]��܇������ϵ�y(t��ng)���зǾ��ԡ��������������r�������c���������ΰ���M�и߾��ȵĿ���������회��F(xi��n)���ΰ�����������������RBF��(j��ng)�W(w��ng)�j���ΰ���׃������ϵ�y(t��ng)���������HPSO�㷨��(y��u)��RBF��(j��ng)�W(w��ng)�j�OӋ��������������������ʹRBF��(j��ng)�W(w��ng)�j������������и��õ������Ժ����m���ԣ���������^���(y��u)���[���s���l���ә�Ŀ�˺���(sh��)�ę�ֵ�ھ��ԌW���㷨���
RBF��(j��ng)�W(w��ng)�j��Ӗ���^�̌��H�Ͼ��nj��ɽM�W(w��ng)�j����(sh��)�ČW����������[�ӹ�(ji��)�c�������RBF�Č���������Լ��[�ӹ�(ji��)�c��(sh��)���[�ӵ�ݔ�����B�ә�ֵ��������Ŀǰ���F(xi��n)���㷨Ҳ�����Դ��·֞�ɲ�����һ�������÷DZO(ji��n)�������Ӗ�����������(sh��)�ą���(sh��)������������(sh��)�����ĺ͌��ȣ��ڶ�����Ӗ���[�ӵ�ݔ���ӵ��B�ә�ֵ�������
---------------------------------------------------------------------------------------------------------------------------
FPGA��˾�Ŀ����|matlab�Tʿ����|matlab��ʿ����|���н�|�Ԍ�����|MATLAB SCI����|MATLA�ڿ�����
FPGA��˾�Ŀ����|FPGA�Tʿ����|FPGA��ʿ����|���н�|�Ԍ�����|FPGA SCI����|FPGA�ڿ�����
FPGA��˾�Ŀ����|Simulink�Tʿ����|Simulink��ʿ����|���н�|�Ԍ�����|Simulink SCI����|Simulink�ڿ�����
|