����������
Tribot��ʷ����С�ē��ж�N�\�������ęC���ˣ�����������һ�ڵ�Nature��
���Ą�(chu��ng)���`�Ё�Դ��Λρ�����Q���Cеρ��������һ��ȫ���\�ӆTһ�ӣ����ܣ��ܿ�ڣ������w���\�ӆTһ�ӷ�(w��n)��(w��n)�ط����^��߀�����ߣ������߶������_���Լ������ߵ�2.5����
���ң���ֻ��10g�أ����ƴ�С���Ԏ�����Ԫ�������o������Դ��
����߀���F(xi��n)�������������Λρһ�ӷֹ��f(xi��)����һ����Ɇ����w�����������顣
�@������ʲô����C���ˣ�
�����\�ӆT

Tribot����Y�ͽY(ji��)��(g��u)�����Ԉ�(zh��)�����ߺ͏����������
���ߣ��ǿ��ɂ��ȁ�����ӡ�һ�����ǰ�ߣ�

�������t�ܱ��l(f��)�����ߵ��������ݻ������}�IJ������������ܡ���ڡ���
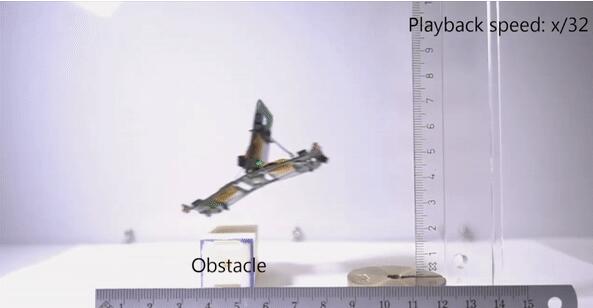
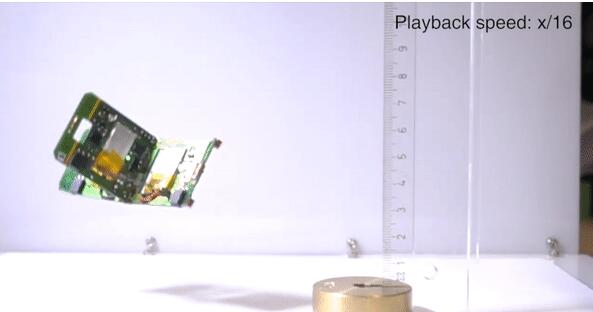
����߀�������ܣ�������_���Լ����ߵ�2.5����
��˸߳��ď��������`�Ё�Դ����ρ��
��ρ��ρ�������һ���٣�����73����ͬ����N�������Ĺ�ͬ���c���L��һ��������M�ǡ�
�@�����M�ǿ��Դ��_�����Ժ��ϣ��ܮ�(d��ng)�����ò��C�ã�Ҳ��������
��(d��ng)����Σ�U�r����ρѸ���Ƅ��@�����M�ǣ����ܰ��Լ�������ȥ���h�x�°l(f��)�F(xi��n)����
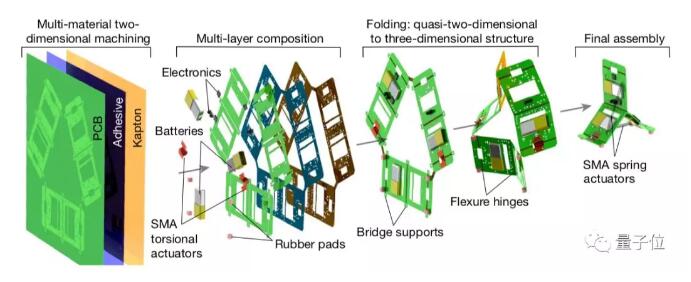
Tribot����Ҫģ������ρ�����M�ǣ�ͨ�^���K�ۯB��һ��ď�(f��)�ϲ��ϣ������������εĽY(ji��)��(g��u)�������ρ�����w�����҃ɂ����M�ǡ�
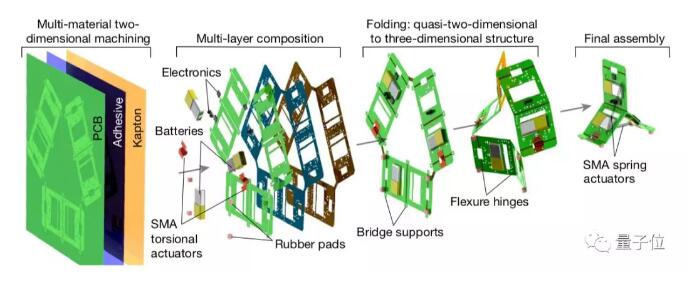
��ƽ�IJ�����PCB��;ۺ��(g��u)�ɣ��ٽ�(j��ng)�^�ׂ��ۯB�����S�Y(ji��)��(g��u)��׃�������S�Y(ji��)��(g��u)���@�ӵ��O(sh��)Ӌ���C�˙C���˵ĿɔUչ�ԡ�
��Ҫ��Ԫ��������ȫ��������PCB���ϣ����������������x��ͨ�ł������Լ��ɳ��늳صȣ��@�ӿ��Ԍ��F(xi��n)�Ԏ�늳أ��o������O(sh��)�䡣
���ڮ�(d��ng)ǰ�汾��Tribot���f���Q����ߴ���P(gu��n)�I������늳ص��������mȻ����Tribotֻ��10g�أ����ƴ�С������(d��ng)ǰʹ�õ�늳أ�3.7V��40mAh����ռPCB����e��һ�룬ռ�C����������40%��
PCB�����tճ��Kapton���������ӣ��@�ɂ���ͨ�^ճ�τ�Ĥճ����һ�𣬲�Ҫ��160���90N�����ቺ2��犣��γ��������q朣���Cеρ�ṩ���g�ԡ�
�C���˵����l����Y���q��B�ӣ����ġ����⡱�t�ɾ��ԏ���ʽ�Π�ӛ���Ͻ�SMA����(zh��)������(g��u)�ɣ��@�N�������ܟ�r����׃�Σ�Y���q朿���ͨ�^�ӟἤ����⡱�팍�F(xi��n)�ȵ��_�]����ǰ���ᵽ��Kapton����Ҳ��һ�N������ϡ�
Y���q�ͬ�rҲ�ǙC���˵ġ����M�ǡ�������ρ�ǘ�ͨ�^�ۉ���팍�F(xi��n)����ҲҪ����������(d��ng)Y���q���������(c��)���е��κ�һ��(c��)��һ����չ��SMA���Ɉ�(zh��)�������_���Ը���180��ĽǶȕr��������һ���c�����ɱ�����׃�ٶȰ����Mʩ�Ӊ�����һ��(c��)��
����@���^�̰l(f��)�����q朵ײ���Tribot�͕���ֱ����������@���^�̰l(f��)�����q會ɂ�(c��)���C���˄t����������������h�Ą������@Ҳ������Խ�ϵK����Ҫ��ʽ����(d��ng)Ȼ�����Y(ji��)�σɷN��ʽ���Է���Ą�������Խ��(f��)�s���Ό���TribotҲ�����y�¡�
���Cеρ��Ⱥ�܅f(xi��)ͬ
��Tribot�ĈFꠅf(xi��)��������Ҳ��������ԭ��Λρ���������H�δ�����������߀�ܽM�����
�������������Α��@��ֻ�Cеρ�������Ƅ���һ�K�������ԟo�����ӵķ��K��
���@�����Ά���������ρ�Ĺ�������˽y(t��ng)һ�IJ������f(xi��)ͬ�IJ��{(di��o)������������߅��ָ�]�ٙCеρ��ָ�]���O(sh��)�����K��Ŀ�ĵأ��f(xi��)�{(di��o)��������ρ���Ą�����
�Dz��������һ����\����һ�ӣ���Ҫ����ؓ؟(z��)����������ؓ؟(z��)����߅ָ�]��һ����̧�������ߣ�һ����һ����������һ�c������һ�c������ǰһ�c���ã�����������
���@Ⱥ�Cеρ��߀�и��߶˵ļ��ܣ�ͨӍ��
���������@��һ�����ε��΄�(w��)����Ҫ�傀Tribot����������ɣ���ֻ����ρ�������w����O(ji��n)�����O(ji��n)���þ��x�������y�����K�c�Լ����������x��Ȼ��֪ͨ�@���΄�(w��)��ָ�]�١�ָ�]�ٕ�����(j��)�@�������������ρ���^�m(x��)ǰ�M��ֹͣ�Ƅӡ�
���˵�ҕ�X��������һ�ӣ���ijЩ�Ƕ���ָ�]�ٺͱO(ji��n)��֮�g��ͨ����̖������࣬�����΄�(w��)�������M�У�߀��Ҫһ����ʹ�����M�����������_���ǣ���ָ�]�ٺͱO(ji��n)�����f��Ϣ��
��(li��n)�\��Ҳ�]�І��}��
����һ������У��ɂ��C����Ҫһǰһ���Խ�ϵK���������Թ̶����L���С�
����ǰ��ęC�����nj���е�ָ�]�٣�ָ�]�������е��^�����þ��x�������B�m(x��)�����ϵK���������Ĺ�ρ�H���Ձ����I(l��ng)��(d��o)����Ϣ�����������������M�Эh(hu��n)�����衣
�ڌ���M���^���У�ָ�]�ٰl(f��)�F(xi��n)���ϵK����(d��ng)��ͣ�����ϵKǰ�r��������r��֪�˹�ρ���յ���Ϣ��ρ�H�y����һ�����cָ�]��֮�g�ľ��x��ͨ�^��ԓ���x���Բ��L��Ӌ�㑪(y��ng)ԓ�����ж��ٲ���
���f����Ϣ��ָ�]��������^���ϵK����ρ�o�S�����������΄�(w��)��
Tribot���C������������ρȺһ�ӣ������ݲ�ͬ�Ľ�ɫ�f(xi��)ͬ����(zh��n)����������߀������������Λρ�����������顪�������ɲ���������һ����ɫ�����µ��΄�(w��)��İ���ĭh(hu��n)����(d��ng)�У������܉��S�r�Г�(d��n)�µĽ�ɫ������̌W(xu��)�͌W(xu��)��(x��)��
ǰ;�o��
�@��Cеρ�ĽY(ji��)��(g��u)���Σ��]�Џ�(f��)�s���⚤������܉�،��F(xi��n)���a(ch��n)��
�mȻ��(d��ng)ǰ�汾��Tribot�ɲ����Ժ�Ӌ���������ޣ������ѽ�(j��ng)���F(xi��n)���ˌ��F(xi��n)�����}���m��(y��ng)������
�ھo�������ͭh(hu��n)���O(ji��n)�y�I(l��ng)��Tribot���пɞ顣�������Ա��������첢���w����ͨ�^�������wͨӍ���ٶ�λĿ�ˣ�����Ҫ���ǣ������܉���܂��w�����Ĵ��r��
���H��ˣ�TribotҲ�Н����l(f��)չ��һ����Ȥ��ƽ�_���ɞ�C���˽�Ę�ݮ�ɣ��ɔUչ�����ˣ������֣����˶�����������̽���C�����µĿ����ԡ�
EPFL��Ʒ
�@���Cеρ�����߂���������ɣ(li��n)�������W(xu��)Ժ���ؘ�(g��u)�C���ˌ���Һʹ����W(xu��)���m��(y��ng)�C���ˌ���҃ɂ��C��(g��u)��
һ��С��Zhenishbek Zhakypov�������ڼ�����ϣ˹̹��Ŀǰ����ʿ��ɣ(li��n)�������W(xu��)Ժ�x������ǰ�Tʿ���I(y��)����������_��˴�W(xu��)��Sabanci University���������T�о����N���ؘ�(g��u)�C���ˣ�Ҳ���Ǖ�׃�εęC���ˡ�
(li��n)ϵ��highspeedlogic
QQ ��1224848052
�ţ�HuangL1121
�]�䣺1224848052@qq.com
�W(w��ng)վ��http://www.mat7lab.com/
�W(w��ng)վ��http://www.hslogic.com/