����������
ʹ��CA�a��P�a�ɷN�a��^(q��)���p�l���еăɷN��ͬ���l��������P�a���ڷdz��L����������܊��P�a������140���죬������������ð汾ҲҪ7��������҂��o���ڷ�����ߌ�(sh��)�H�yԇ�ĕr(sh��)����ô���r(sh��)�gȥ�(y��n)�CP�a�IJ��@�������@��҂���P�a���������º������ʹ�Â��S�C(j��)�������ڞ�2048bit��������P�a���֡�
һ����r�£���(d��o)����ĵ��l�ʞ�50hz�����CA�a���l�ʞ�1M�����P�a���l�ʞ�10M�����@����˜yԇ����Ҫ������҂���Ҫ�����l�ʁ��M(j��n)�Мyԇ��
�e��(g��)���ε������������O(sh��)ֱ�Ӳ���P�a���l��10M������Ϻ�������l�{(di��o)�ƣ����O(sh��)�d����8���ɘ����������ô�����l����80M�����Ȼ��(y��ng)����Ğ�50hz����Ҳ����һ��(g��)���������������(y��ng)1.6M��(g��)�ɘӕr(sh��)�����������@�ڷ����^�����@Ȼ�]���M(j��n)�����������ԣ��@���҂����ׂ�(g��)�l��ָ��(bi��o)������������������(y��n)�C����@�Ӹ�Ҳ��Ӱ푌�(sh��)�H�Ĝyԇ��

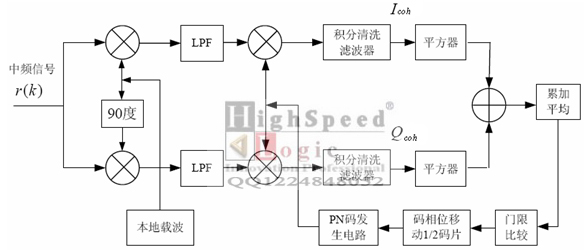
ͨ�^���@ģ�K�@�ó�ʼ���lƫֵ��Ȼ���M(j��n)���d��ͬ���������c��ͬ�r(sh��)��ͨ�^�aͬ����������λ�IJ��@��������M(j��n)���ۙ�A�Ρ�
���شa��������C/A�a��(bi��o)�Q�l��(Hz)�a(ch��n)��C/A�a�c���յ��IJɘ���̖���P(gu��n)�ۼ������һ��(g��)�e�����ڣ�ͨ��1��(g��)�a���ڣ������P(gu��n)���c�z�y�T�ޱ��^�������������P(gu��n)������T����������t�J(r��n)�鲶�@�ɹ��������õ�����(y��ng)�Ĵa��λ��Ӌ(j��)������������P(gu��n)��С���T�ޣ��a�l(f��)�����Ԅ�(d��ng)�����شa�a��λ��ǰ���������(d��ng)1/2��1/4��(g��)�aƬ����Ȼ���^�m(x��)���P(gu��n)�ۼәz�y�������� �� �� ��(g��)�δa���ں��ҵ��c���δaͬ����ݔ��δa����λ��B(t��i)�� ��(g��)�δa���ں��ҵ��c���δaͬ����ݔ��δa����λ��B(t��i)�� ����һ��(g��)�a���ڃ�(n��i)�aƬ�Ĕ�(sh��)Ŀ�����Ԍ�(sh��)�F(xi��n)�δa�IJ��@���������挦���M(j��n)���P(gu��n)���M(j��n)�к��ν�B������ԭ��DҊ�D1�� ����һ��(g��)�a���ڃ�(n��i)�aƬ�Ĕ�(sh��)Ŀ�����Ԍ�(sh��)�F(xi��n)�δa�IJ��@���������挦���M(j��n)���P(gu��n)���M(j��n)�к��ν�B������ԭ��DҊ�D1��
��GPSӲ�����ՙC(j��)�������̖���@�·��1ms�������{(di��o)��������̖�l(f��)�����Ĵa��λֵ�Ͷ������l�ƹ�Ӌ(j��)ֵ������ʹ�a(ch��n)������̖����(zh��n)ijһ������Ԫ���������(d��ng)������̖�cݔ����l(w��i)����̖����(zh��n)�����S�ķ�����(n��i)�õ��ĽY(ji��)�����^�z�y�ֵ���t��̖���@�ɹ������������ֹͣ������(d��ng)�a��ۙ�h(hu��n)·������t������Ԫ�{(di��o)���l�ʺʹa��λ�IJ��M(j��n)���؏�(f��)�����^������ֱ����̖�����@��ֹ��
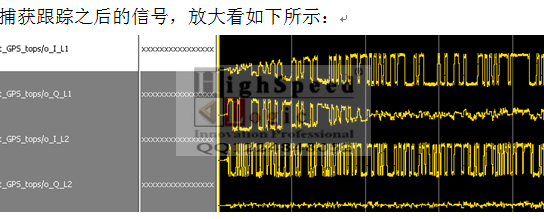
�@��҂��O(sh��)Ӌ(j��)�˃ɂ�(g��)��ͨ���ĕr(sh��)��(d��ng)���P(gu��n)���@�㷨�������팦�p�l�µ�GPS��̖�M(j��n)�в��@��������r(sh��)��(d��ng)���P(gu��n)���@����������ף��Ҋ��һ�N���@���������(d��ng)ǰ��GPS���ՙC(j��)���������@�N������(sh��)�F(xi��n)C/A�a�IJ��@�����������(j��ng)�^һ��(g��)�δa���ں�ɫ@��һ�����P(gu��n)ֵ����(y��u)�c(di��n)��Ӳ����(sh��)�F(xi��n)���^����������ԓ���@�㷨�������(g��)���S��������Ҫ�ĕr(sh��)�g�Ǻ��L���������@ô�L�IJ��@�r(sh��)�g�ڸ߄�(d��ng)�B(t��i)�h(hu��n)�����Dz��ܽ��ܵġ�
�r(sh��)��(d��ng)���P(gu��n)���@�������ڕr(sh��)�g���(n��i)ͨ�^C/A�a�Ļ���(d��ng)�M(j��n)�е���̖�IJ��@�^���������Ҫͨ�^������{(di��o)�����شa�Ĵa��λ�ͱ����d���l�ʁ팍(sh��)�F(xi��n)��̖�IJ��@������������һ��������(n��i)�����x���d���l�����ͬ�r(sh��)�ڱ��؏�(f��)�F(xi��n)�����@���ı����l(w��i)�ǵ�C/A�a�������Ȼ���Ƅ�(d��ng)���؏�(f��)�F(xi��n)C/A�a�Ĵa��λ������������cݔ���l(w��i)����̖��C/A�a���P(gu��n)������z�y���P(gu��n)��ֵ��ӛ�ԓ��ֵ������(y��ng)��C/A�a�Ƅ�(d��ng)�Ĵa��λ���������(j��)C/A�a�ď�(qi��ng)�����P(gu��n)��������(d��ng)���ՙC(j��)����(f��)�F(xi��n)��C/A�a�cݔ����l(w��i)��C/A�a�Ĵa��λ���κ�һ߅��ƫ�Ƴ��^һ��(g��)���a�r(sh��)��������С�����P(gu��n)ֵ�����g�Ǿ��Ե�׃������@��ͨ�^�z�y���P(gu��n)��ֵ�͵õ��˳�ʼ�Ĵa��λ����������ԓ�x�����d���l���]�Йz�y�����P(gu��n)��ֵ������t�f���Á턃�x�d���ı����d������(zh��n)�_���������ص��d���l����һ���IJ��L���Ӻ͜p�٣��؏�(f��)�����^�����֪�����@�����P(gu��n)��ֵ�������ӛ��®�(d��ng)ǰ�����d�����l�ʣ��@��ͨ�^����(f��)�����õ��ı����d�����l���cݔ��GPS��̖���l�IJ�ֵ���Ƕ������l�ơ�
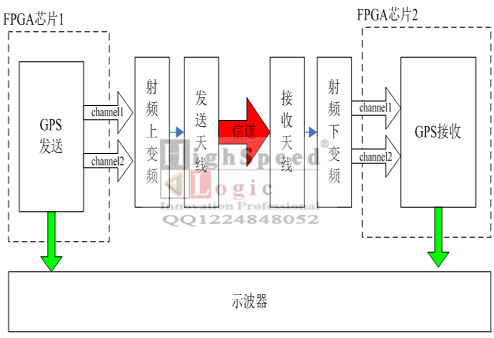
��(sh��)�HӲ���yԇ���£�
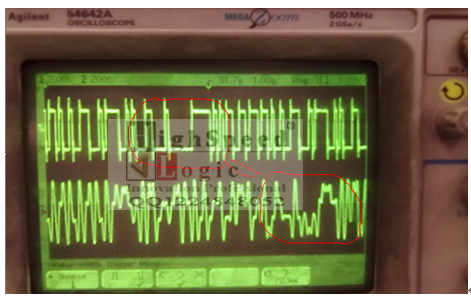
----------------------------------------------------------------------------
FPGA��˾�(xi��ng)Ŀ����|matlab�Tʿ����|matlab��ʿ����|���н�|�Ԍ�����|MATLAB SCI����|MATLA�ڿ�����
FPGA��˾�(xi��ng)Ŀ����|FPGA�Tʿ����|FPGA��ʿ����|���н�|�Ԍ�����|FPGA SCI����|FPGA�ڿ�����
FPGA��˾�(xi��ng)Ŀ����|Simulink�Tʿ����|Simulink��ʿ����|���н�|�Ԍ�����|Simulink SCI����|Simulink�ڿ�����
|