����������
ʹ��CA�a��P�a�ɷN�a��^���p�l���еăɷN��ͬ���l��������P�a���ڷdz��L������܊��P�a������140���죬������������ð汾ҲҪ7��࣬�҂��o���ڷ�����ߌ��H�yԇ�ĕr����ô���r�gȥ��CP�a�IJ��@�������@��҂���P�a���������º�����ʹ�Â��S�C�������ڞ�2048bit��������P�a���֡�
һ����r�£�������ĵ��l�ʞ�50hz��CA�a���l�ʞ�1M��P�a���l�ʞ�10M���@����˜yԇ����Ҫ���҂���Ҫ�����l�ʁ��M�Мyԇ��
�e�����ε����ӣ����Oֱ�Ӳ���P�a���l��10M�����Ϻ�������l�{�ƣ����O�d����8���ɘӣ���ô�����l����80M��Ȼ������Ğ�50hz��Ҳ����һ����ģ�������1.6M���ɘӕr����ڣ��@�ڷ����^�����@Ȼ�]���M�У����ԣ��@���҂����ׂ��l��ָ�������£�����������C���@�Ӹ�Ҳ��Ӱ푌��H�Ĝyԇ��

ͨ�^���@ģ�K�@�ó�ʼ���lƫֵ��Ȼ���M���d��ͬ�����c��ͬ�r��ͨ�^�aͬ���������λ�IJ��@������M���ۙ�A�Ρ�
���شa��������C/A�a�˷Q�l��(Hz)�a��C/A�a�c���յ��IJɘ���̖���P�ۼӣ�һ���e�����ڣ�ͨ��1���a���ڣ������P���c�z�y�T�ޱ��^��������P������T�ޣ��t�J�鲶�@�ɹ����õ������Ĵa��λ��Ӌ��������P��С���T�ޣ��a�l�����Ԅӌ����شa�a��λ��ǰ���������1/2��1/4���aƬ��Ȼ���^�m���P�ۼәz�y������� �� �� ���δa���ں��ҵ��c���δaͬ����ݔ��δa����λ��B�� ���δa���ں��ҵ��c���δaͬ����ݔ��δa����λ��B�� ����һ���a���ڃȴaƬ�Ĕ�Ŀ�����Ԍ��F�δa�IJ��@�����挦���M���P���M�к��ν�B����ԭ��DҊ�D1�� ����һ���a���ڃȴaƬ�Ĕ�Ŀ�����Ԍ��F�δa�IJ��@�����挦���M���P���M�к��ν�B����ԭ��DҊ�D1��
��GPSӲ�����ՙC���̖���@�·��1ms�������{��������̖�l�����Ĵa��λֵ�Ͷ������l�ƹ�Ӌֵ��ʹ�a������̖����ijһ������Ԫ����������̖�cݔ����l����̖���������S�ķ����ȵõ��ĽY�����^�z�y�ֵ���t��̖���@�ɹ�������ֹͣ�����Ӵa��ۙ�h·����t������Ԫ�{���l�ʺʹa��λ�IJ��M���؏������^�̣�ֱ����̖�����@��ֹ��
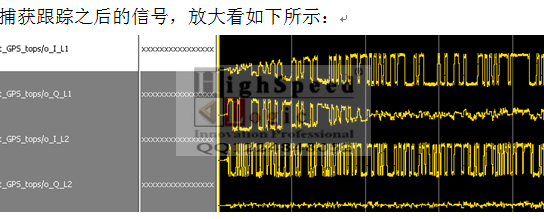
�@��҂��OӋ�˃ɂ���ͨ���ĕr�����P���@�㷨���팦�p�l�µ�GPS��̖�M�в��@���r�����P���@����������ף��Ҋ��һ�N���@��������ǰ��GPS���ՙC���������@�N�������FC/A�a�IJ��@�������^һ���δa���ں�ɫ@��һ�����Pֵ�����c��Ӳ�����F���^���Σ���ԓ���@�㷨����������S��������Ҫ�ĕr�g�Ǻ��L�ģ��@ô�L�IJ��@�r�g�ڸ߄ӑB�h�����Dz��ܽ��ܵġ�
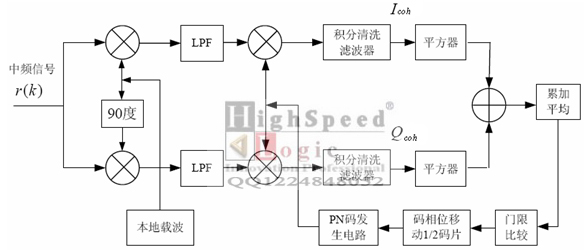
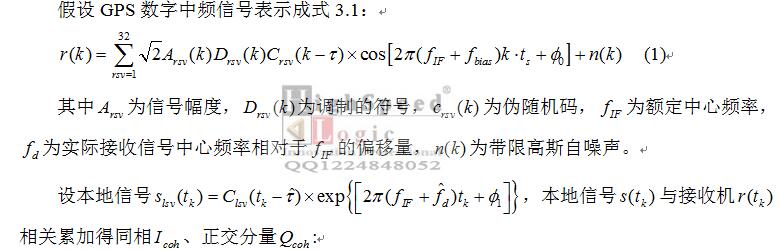
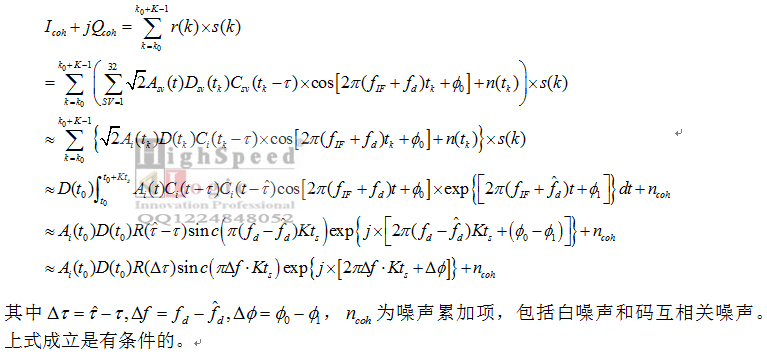
�r�����P���@�������ڕr�g���ͨ�^C/A�a�Ļ����M�е���̖�IJ��@�^�̡�����Ҫͨ�^������{�����شa�Ĵa��λ�ͱ����d���l�ʁ팍�F��̖�IJ��@��������һ�������������x���d���l�ʣ�ͬ�r�ڱ��؏ͬF�����@���ı����l�ǵ�C/A�a��Ȼ���Ƅӱ��؏ͬFC/A�a�Ĵa��λ�������cݔ���l����̖��C/A�a���P�����z�y���P��ֵ��ӛ�ԓ��ֵ��������C/A�a�ƄӵĴa��λ������C/A�a�ď������P�ԣ������ՙC���ͬF��C/A�a�cݔ����l��C/A�a�Ĵa��λ���κ�һ߅��ƫ�Ƴ��^һ�����a�r������С�����Pֵ�����g�Ǿ��Ե�׃�����@��ͨ�^�z�y���P��ֵ�͵õ��˳�ʼ�Ĵa��λ�������ԓ�x�����d���l���]�Йz�y�����P��ֵ���t�f���Á턃�x�d���ı����d�����ʴ_�������ص��d���l����һ���IJ��L���Ӻ͜p�٣��؏������^�̣�֪�����@�����P��ֵ��ӛ��®�ǰ�����d�����l�ʣ��@��ͨ�^���������õ��ı����d�����l���cݔ��GPS��̖���l�IJ�ֵ���Ƕ������l�ơ�
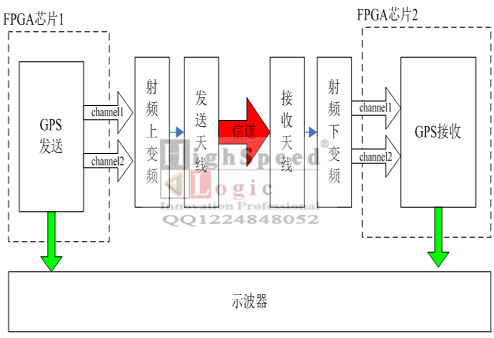
���HӲ���yԇ���£�
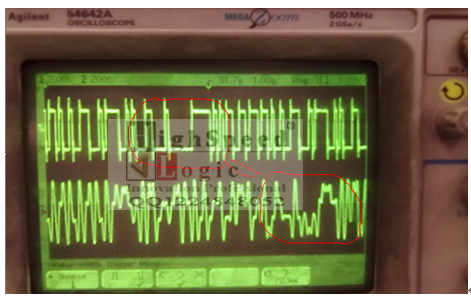
----------------------------------------------------------------------------
FPGA��˾�Ŀ����|matlab�Tʿ����|matlab��ʿ����|���н�|�Ԍ�����|MATLAB SCI����|MATLA�ڿ�����
FPGA��˾�Ŀ����|FPGA�Tʿ����|FPGA��ʿ����|���н�|�Ԍ�����|FPGA SCI����|FPGA�ڿ�����
FPGA��˾�Ŀ����|Simulink�Tʿ����|Simulink��ʿ����|���н�|�Ԍ�����|Simulink SCI����|Simulink�ڿ�����
|