ģ�M�߶�Ӌ��altimeter Tritech model
PA200-20G����
DVL��LinkQuest NavQuest 600
Micro DVL����
GPS��Navman��3260����
IMU�T�Ԇ�Ԫ��inertial measurement unit
Phidgets 1056 PhidgetSpatial3/3/3����
����Ӌ��pressure sensor MPX5700DP
chip����
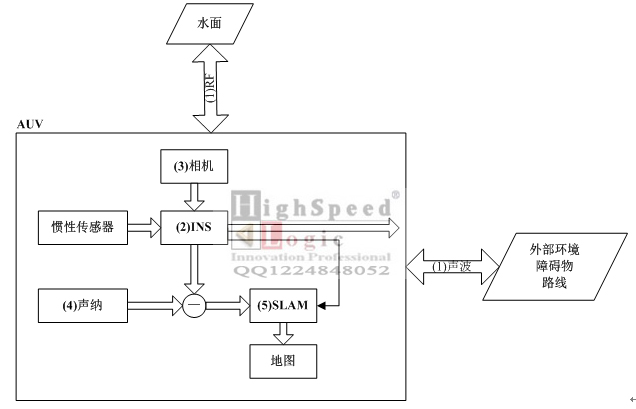
���M����SeaBotix HPDC1500�����M�����Ă����ɂ�����ǰ�ɂ��������¡�Ҫ�����S�ģ�ǰ��ɂ����M����һ���oֹ���ӣ���һ���ӣ�AUV�Ϳ����D����ģ�M�ɔ_�h����������Ӱ푣�ˮ���ٶȣ����ˣ��������ԜpС����С�`�
AUV���M�^���У������AUV����ȣ��߶ȣ��ٶȣ����ٶȣ�������λ�õĈD��߀����һ��̓�M����ʾϵ�y����ҕ�l��߅һ�ӡ������ڽo����֪��������r�£��߶ȣ��������ٶȵȣ�ģ�M��AUV�\�ӡ�
����������ҕϵ�y��vision����
������ɂ�vision camera�քe���գ�camera����׃�Q�Ƕȣ����Է������Ĕz���w�c�����C֮�g�ľ��x���߶ȵȡ�
���Է�����ںڰ��h�����գ������ϵK�����ա�
�����ģ��{��sonar����
ģ�M�{̽�y���w���x��С�ȣ��Д��Ƿ���Զ��_��
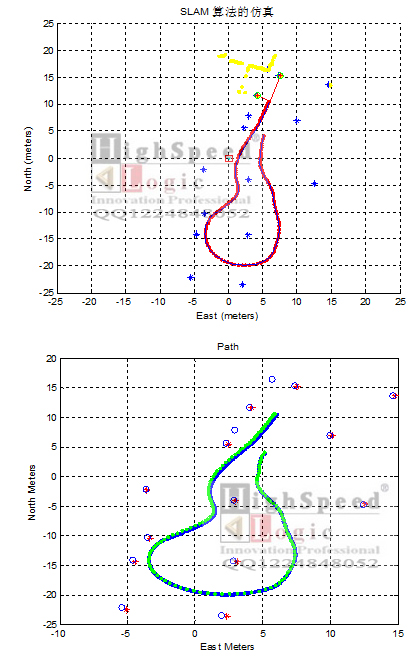
���壺SLAM��
Ҫ���挍�ĭh���¿��Ԍ��F�L��·���D���ڷ���l���£������o���Ĕ�������֪��·���D���L�Ƴ�����·���D�����A���O���õ�·���У������ϵK���C���˿��ԽY��vision���{�p�٣��ɼ��DƬ���Д࣬��ܣ����@�^�ϵK����^�m���O��·��ǰ�M��
����������ϵ�y��
�������ϵ�y�C�������M�з��档
��INS���}����ģ��
ģ�M�߶�Ӌ��DVL��GPS��IMU�T�Ԇ�Ԫ������Ӌ�����M�������M�����Ă����ɂ�����ǰ�ɂ��������£���
Ҫ�����S�ģ�ǰ��ɂ����M����һ���oֹ���ӣ���һ���ӣ�AUV�Ϳ����D����ģ�M�ɔ_�h����������Ӱ푣�ˮ���ٶȣ����ˣ��������ԜpС����С�`�
AUV���M�^���У������AUV����ȣ��߶ȣ��ٶȣ����ٶȣ�������λ�õĈD��߀����һ��̓�M����ʾϵ�y����ҕ�l��߅һ�ӡ������ڽo����֪��������r�£��߶ȣ��������ٶȵȣ�ģ�M��AUV�\�ӡ�