����������
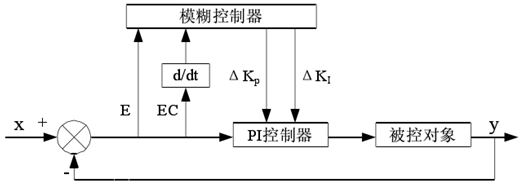
�������c�vһ��ģ��PI/PID���������OӋ���̣��������Փ������ʾ��
�@��҂������õ�ģ��PI�Ŀ��Ʒ�ʽ�����Ԍ��F���r�������£��Ķ����ƿ���ϵ�y�Ŀ������ܣ���߿���ϵ�y�ķ����Ժ߾����ԡ�
ģ������Փ���`�ٶȺ����Ĵ_��
��ϵ�y�����]������Ҏ�t�Č��H��r�����n�}�x��7��ģ���Z������ģ��Ҏ�t�Ļ����Z�䣬�@����Ҫ��NB (ؓ��)��NM (ؓ��)��NS (ؓС)��ZO (��)��PS (��С)��PM (����)��PB (����)���@���x���ģ��׃��ݔ���`��E��ݔ���`��׃����Ec��ݔ��׃������
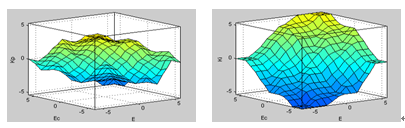
ݔ��E��EC��ݔ����ģ����Փ�����Mamdani��ͣ�ģ���Z�Լ��Ϟ�{NB��NM��NS��ZO��PS��PM��PB}����MATLAB�У�ʹ��ģ�������������OӋ�����v����ģ��ģ�������`�ٺ��������õ��`�ٺ��������ηֲ��������ηֲ������B�ֲ��ȡ�
�`�ٺ�������͛Q����ϵ�y�Ŀ������ܣ��`�ٺ����е�����б��Խ����ģ���ֱ��ʾ�Խ�ߣ�ϵ�y�Ŀ������ܾ�Խ�ͣ��`�ٺ����е�����б��ԽС����ģ���ֱ��ʾ�Խ�͡�ϵ�y�Ŀ������ܾ�Խ�ߣ�ϵ�y�����Ծ�Խ�ߡ�
ģ������Ҏ�t
ģ������Ҏ�t�������Ļ���ԭ�t�飬���`���^��ĕr���M��������`������`���^С�ĕr���������ܴ��ڵij��{�������f��������Hֵ�ͺ�����ֵ��ƫ��ؓ����ƫ��׃���ʞ�ؓ�Еr���t��Ҫʹ��Id��ݔ������������ģ���Z�Եĵȼ����Ե�֪��ģ������Ҏ�t��49�lģ���l���Z�䡣
��ģ����
���^�ķ�ģ���������Ǹ���ģ������Ҏ�tӋ�����������ݔ������ͨ����r�£���ģ���㷨��Ҫ�мә�ƽ��������Ԫ��ƽ�������㷨��
ͨ�^MATLAB�е�ģ��Ҏ�t���OӋ���������Եõ�ģ��Ҏ�t�����SЧ���D���@�����SЧ���D�еĿv���˱�ʾ����ģ��������ݔ��������u�����档�����Ч����D3��ʾ��
ϵ��highspeedlogic
QQ ��1224848052
�ţ�HuangL1121
�]�䣺1224848052@qq.com
�Wվ��http://www.mat7lab.com/
�Wվ��http://www.hslogic.com/
�Œ�һ�ߣ�

|