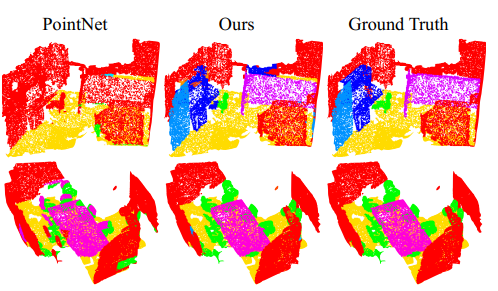
����������
PointNet��ȱ�c��
PointNet�����@�ɶ������g�c����ľֲ��Y�������������R�e�����ȈD���ͷ��������s������������
���ö������g���x���҂��ľW�j�܉�ͨ�^���������ij߶ȁ�W���ֲ�������
�c��ͨ�����ò�ͬ���ܶ��M�вɘӣ��@�����ڽyһ�ܶ���Ӗ���ľW�j�����ܴ�͡�
�µļ��όW���Ӂ����m���ؽY�϶����߶ȵ�������
 һ����B��
PointNet++���ӷ�ʽ̎���ڶ������g�вɘӵ�һ�M�c ��
ͨ�^���A���g�ľ��x�������@�M�c�ָ���دB�ľֲ��^��
��ȡ�ֲ����������@����С����ľ����νY��; �@Щ�ֲ��������Mһ���ֽM�����Ć�Ԫ����̎���Ԯa��������������
�؏��@���^��ֱ���҂��@�������c����������
��Ҫ��Q�Ć��}��
��������c���Ą���
���ͨ�^�ֲ������W�������c����ֲ�������
�@�ɂ����}�����P�ģ�
�c���ķָ��횮a����օ^�Ĺ�ͬ�Y�����Ա�����e�O���ǘӹ����ֲ������W���ߵę��ء�
PointNet++��Ƕ�ķָ�ݔ�뼯���f�w���\��pointNet
ÿ���օ^����������ÿ���օ^�����|��λ�ú�Ҏģ���|��ͨ�^���h�ɘ��c�㷨�@�ã�FPS��
����Ұ��هݔ�딵���Ͷ�����
�������}������
X = (M; d) ���xɢ�Ķ������g��m���c��d�Ǿ��x������m���ܶȲ�����
����������
���Կ��������ˌӴνY����pointNet��
����pointnet��ȱ����ͬҎģ�ϲ��ֲ������ĵ������������÷������W����ܣ�
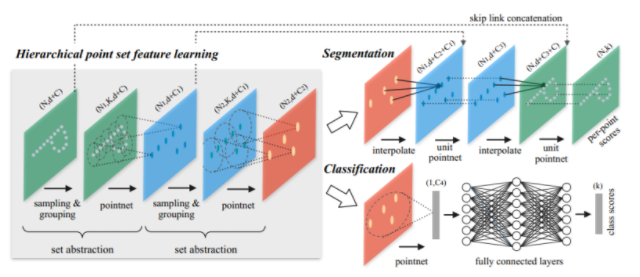
�Ӽܘ���
New architecture builds a hierarchical grouping of points and progressively abstract larger and larger local regions along the hierarchy.
At each level, aset of points is processed and abstracted to produce a new set with fewer elements.
����ӵ������P�I�ӣ�
Sampling layer : selects a set of points from input points (�_���ֲ��^��ĈD�ģ�
Grouping layer : �ֽM��ͨ�^�����|���܇��ġ��������c�혋���ֲ��^��
PointNet layer ��ʹ��С��PointNet���ֲ��^��ģʽ���a����������
һ����B��
PointNet++���ӷ�ʽ̎���ڶ������g�вɘӵ�һ�M�c ��
ͨ�^���A���g�ľ��x�������@�M�c�ָ���دB�ľֲ��^��
��ȡ�ֲ����������@����С����ľ����νY��; �@Щ�ֲ��������Mһ���ֽM�����Ć�Ԫ����̎���Ԯa��������������
�؏��@���^��ֱ���҂��@�������c����������
��Ҫ��Q�Ć��}��
��������c���Ą���
���ͨ�^�ֲ������W�������c����ֲ�������
�@�ɂ����}�����P�ģ�
�c���ķָ��횮a����օ^�Ĺ�ͬ�Y�����Ա�����e�O���ǘӹ����ֲ������W���ߵę��ء�
PointNet++��Ƕ�ķָ�ݔ�뼯���f�w���\��pointNet
ÿ���օ^����������ÿ���օ^�����|��λ�ú�Ҏģ���|��ͨ�^���h�ɘ��c�㷨�@�ã�FPS��
����Ұ��هݔ�딵���Ͷ�����
�������}������
X = (M; d) ���xɢ�Ķ������g��m���c��d�Ǿ��x������m���ܶȲ�����
����������
���Կ��������ˌӴνY����pointNet��
����pointnet��ȱ����ͬҎģ�ϲ��ֲ������ĵ������������÷������W����ܣ�
�Ӽܘ���
New architecture builds a hierarchical grouping of points and progressively abstract larger and larger local regions along the hierarchy.
At each level, aset of points is processed and abstracted to produce a new set with fewer elements.
����ӵ������P�I�ӣ�
Sampling layer : selects a set of points from input points (�_���ֲ��^��ĈD�ģ�
Grouping layer : �ֽM��ͨ�^�����|���܇��ġ��������c�혋���ֲ��^��
PointNet layer ��ʹ��С��PointNet���ֲ��^��ģʽ���a����������
ݔ�룺N * (d + c) ��ꇣ�d�������ˣ�c�c�������ȡ�
ݔ����. It outputs an N0 �� (d + C0) matrix of N0 subsampled points with d-dim coordinates and new C0-dim feature vectors summarizing local context
�ɘӌӣ��������h�c�ɘӣ�FPS�����x���cx1��x2...���Ӽ� �������x������Ӽ��ښW����ÿ��g�Ͼ��x���h)
�ֽM�ӣ�
ݔ�룺��С��N��d + C�����c���ʹ�С��NId��һ�M�|�ĵ�����
ݔ��:groups of point sets of size N0 �� K �� (d + C),where each group corresponds to a local region and K is the number of points in the neighborhood of centroid points
ʹ�÷�����bell��ԃ����cnn��ȣ�
pointNet�ӣ�
ݔ�룺N0 local regions of points with data size N0��K��(d+C)
ݔ����ݔ���е�ÿ���ֲ��^�������|�ĺ;ֲ������������,�@Щ�������|�ĵ������M�о��a�� Output data size is N0 �� (d + C0)
���ֲ����c�����M���D����ͨ�^ʹ���������˺��cҪ�أ��҂����Բ����ֲ��^��ȵ��c���c�Pϵ ��
3.3 ��������ɘӵ����������W����
we should look for larger scale patterns in greater vicinity.
density adaptive PointNet layers
ϵ��highspeedlogic
QQ ��1224848052
�ţ�HuangL1121
�]�䣺1224848052@qq.com
�Wվ��http://www.mat7lab.com/
�Wվ��http://www.hslogic.com/
�Œ�һ�ߣ�

|