����������
�D�о���һ�� OpenAI ���� PPO Ӗ���ęC���ˡ���Ҫ�W���ߡ��ܡ��D(zhu��n)����Lԇ�ӽ����͵ġ��S�C�Ƅӵ�Ŀ�ˣ��h(hu��n)����߀��һ����ײ�C���˵�С��o�������y�ȣ�������߀Ҫ�W���ܵ�ײ���Ժ�֏�ƽ�⣬������ײ���Ժ�����վ������
�F(xi��n)���㷨
���ڵIJ����ݶȵ�һ��������(j��ng)�W(w��ng)�j�ڿ����΄���ȡ�������@�M������X�Α����S�\�ӡ����嶼�Ǻܺõ����ӡ������ò����ݶȵķ���ȡ�úõĽY��Ҳ��һЩ�y�ȣ�����@������������E��(sh��)�dz����У�����x��̫С��Ӗ���^�͕̾��������˽^��������x��̫������̖�͕��͛]�����У������п���ģ�ͱ��F(xi��n)ѩ��ʽ���½����@����IJɘ�Ч��Ҳ��(j��ng)���ܵͣ��W�����ε��΄վ���Ҫ���f����ʮ�|���Ŀ������Δ�(sh��)��
���˽�Q�����е��@Щ���}���о��ˆT���ѽ�(j��ng)�ҵ��� TRPO��Trust Region Policy Optimization�����΅^(q��)����ԃ�(y��u)������ ACER��Sample Efficient Actor-Critic with Experience Replay���ܸ�Ч�ɘӵĎ��н�(j��ng)�طŵı�����-�uՓ���㷨�� �@�ӵķ����������Ը��µĴ�С�������ƻ�������ă�(y��u)�����_�����@�ӵ�Ч�����@Щ����Ҳ���ڄe�ķ��渶���˴��r��ACER �� PPO���s�ö࣬��Ҫ�~��Ĵ��a���ڲ�����ļm���Լ�һ���طž��_�^(q��)���� Atari �yԇ�еľ��w���F(xi��n)�sֻ�� PPO �㏊��һ�c�c��TRPO �mȻ���B�m(x��)�����΄��к����ã����nj����Ժ���(sh��)�̓rֵ����(sh��)�����o���pʧ֮�g�й��텢��(sh��)���㷨�^�y���ݣ����� Atari ������һЩҕ�Xݔ��ռ��(j��)��Ҫ���ֵ��΄վ����@�ӡ�
PPO
�ڱO(ji��n)���W���У����F(xi��n)�pʧ����(sh��)�����������ݶ��½��������ף����һ����ϲ��Mʲô�����{(di��o)��(ji��)������(sh��)�Ϳ϶��܉�õ��ܺõĽY���������ڏ����W������Ҫ�@�úýY���͛]���@ô�����ˣ��㷨�����S��׃���IJ������y�� debug��������Ҫ���ܴ�ľ������{(di��o)ԇ�ϲ��ܵõ��ýY����PPO �t�ڌ��F(xi��n)���y�׳̶ȡ��ɘӏ��s�ȡ��{(di��o)ԇ���辫��֮�gȡ�����µ�ƽ�⣬����ÿһ�������ж����LԇӋ���µIJ��ԣ��@�ӿ����pʧ����(sh��)��С����ͬ�r߀�ܱ��C�c��һ�������IJ����g��ƫ�������^С��
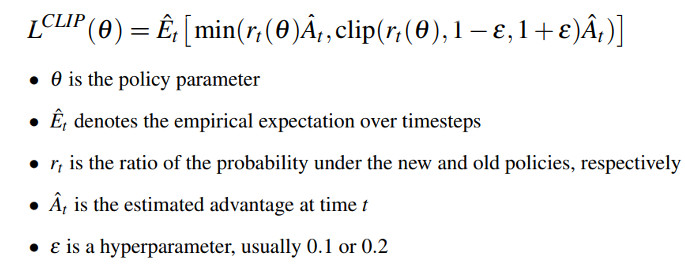
֮ǰ OpenAI ��Ԕ����B�^ PPO��һ��׃�N ��NIPS 2016 Փ��ҕ�l��ͨ�^���ԃ�(y��u)���M����ȏ����W������������һ�����m�� Kullback�CLeibler ���P헿���ÿ�ε����еIJ���׃���̶ȡ��F(xi��n)�ڽ�B���@�N��׃�N�tʹ����һ�N�����㷨�к�Ҋ��ȫ�µ�Ŀ�˺���(sh��)��
���΅^(q��)����µĹ��ܾͿ���ͨ�^�@�NĿ�˺���(sh��)�õ����F(xi��n)�����c�S�C�ݶ��½����ݣ������Ƴ���Kullback�CLeibler ���P헼��������m���������ܲ�Ķ��������㷨���ڜyԇ�У�PPO �㷨���B�m(x��)�����΄���ȡ������õ�Ч���������� Atari �Α�yԇ�еı��F(xi��n)���c ACER ��ƽ�����]�� PPO �ĺ����ԣ��@�ӵĽY�����������@ϲ�f�֡�
OpenAI ���о��ˆT���OӋ�˾��л��������ęC���ˣ�Ȼ���� PPO Ӗ�������IJ��ԡ����@Щ���� Roboschool �h(hu��n)���Č���У��������I�P�o�C�����O���µ�Ŀ��λ�ã��M��ݔ���Ŀ�������c�Á�Ӗ���C���˵����в�ͬ���C������Ȼ�����M�з�����
���� Roboschool ���@�ӵĺ��ΙC���ˣ�����߀�� PPO �̕����s�ķ���C������·��������Բ�ʿ�D������ Atlas �ķ���ģ�͡����ǰ����p��C���˵�17�������P��(ji��)���@��ģ���Ъ����P��(ji��)�Ĕ�(sh��)Ŀ���_30����Ҳ��һЩ�������о��ˆT�ѽ�(j��ng)�ɹ����� PPO Ӗ������C�����þ��ʵ��ܿ������Խ�ϵK��
����ģ�ͣ�PPO �� TRPO
OpenAI һ���l(f��)���˰�����С��׃�ġ����Ќ��F(xi��n)�� PPO �� TRPO �Ļ���ģ�ͣ����߶��� MPI ���锵(sh��)��(j��)���fģ�K��Python3 �� TensorFlow ������֧�֡�����߀������Ӗ�������еęC���˵��AӖ��ģ�����ӵ��� Roboschool �C���˄���@�С�
(li��n)ϵ��highspeedlogic
QQ ��1224848052
�ţ�HuangL1121
�]�䣺1224848052@qq.com
�W(w��ng)վ��http://www.mat7lab.com/
�W(w��ng)վ��http://www.hslogic.com/
�Œ�һ�ߣ�

|